Fase de construção

Eixo rotores

Quadcopter, quadrotor, drone, multirotor, unmanned aerial vehicle (UAV), multicóptero,
etc., são algumas das designações do engenho voador que é construído com base em três, quatro ou mais
Motores equipados com as respectivas Hélices, Esc's, e mais alguma electrónica e programação do controlador.
para ver o esquema electronico clique aqui
Movimento Motores:
(throttle+) v1+Δv v2+Δv v3+Δv v4+Δv
(throttle−) v1−Δv v2−Δv v3−Δv v4−Δv
(pitch+) v1−Δv v2+Δv v3 v4
(pitch−) v1+Δv v2−Δv v3 v4
(roll+) v1 v2 v3+Δv v4−Δv
(roll−) v1 v2 v3−Δv v4+Δv
(yaw+) v1+Δv v2+Δv v3−Δv v4−Δv
(yaw−) v1−Δv v2−Δv v3+Δv v4+Δv
Fase de testes
Receptor e rádio controlo

-Baterias 180g LiCo2 46A 3S 2300mAh 11,1V
-Bateria 91 g LiCo2 38A 2S 1500mAh 7,4V
-Voltímetros 12g Buzzer e Led
-Esc´s 28g Yellow Siagel 30A (max. 40A) 2-3Lipo BEC 3A 5V
-Motores 47g - 1000Kv 12A
-Esc´s (controladores electrónicos de velocidade)
-Hélices 9,5x4,7 cw
-Hélices 9,5x4,7 ccw
-Rádio receptor Spektrum AR 6210-X + satélite
-Frame X
-Distribuidor de energia
-Controlador Arduino Uno Rv3
-IMU - 9 v2 (unidade inércia)
-GPS GTPA010
-Sensor IFR (infravermelhos)
-Câmara de filmar Hero2
para ver o filme clique aqui
O equipamento utilizado é um transmissor RC Spektrum DX6i, com 6 canais de rádio e capacidades avançadas
de programação. Utiliza a técnica DSM2 a 2.4 Ghz. O receptor instalado no quadcoper é o modelo AR6210 +
satélite.
Fase de construção da frame
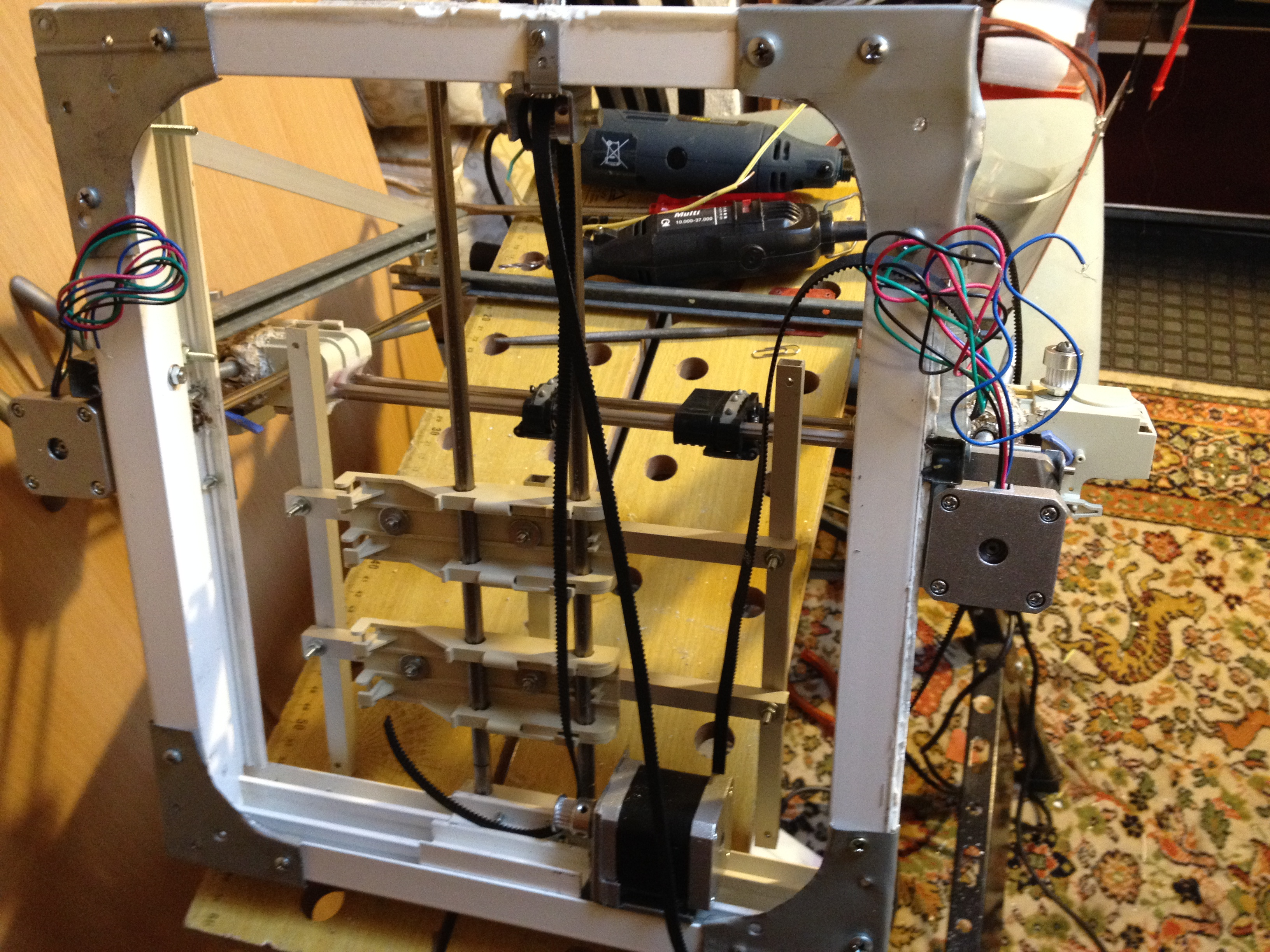
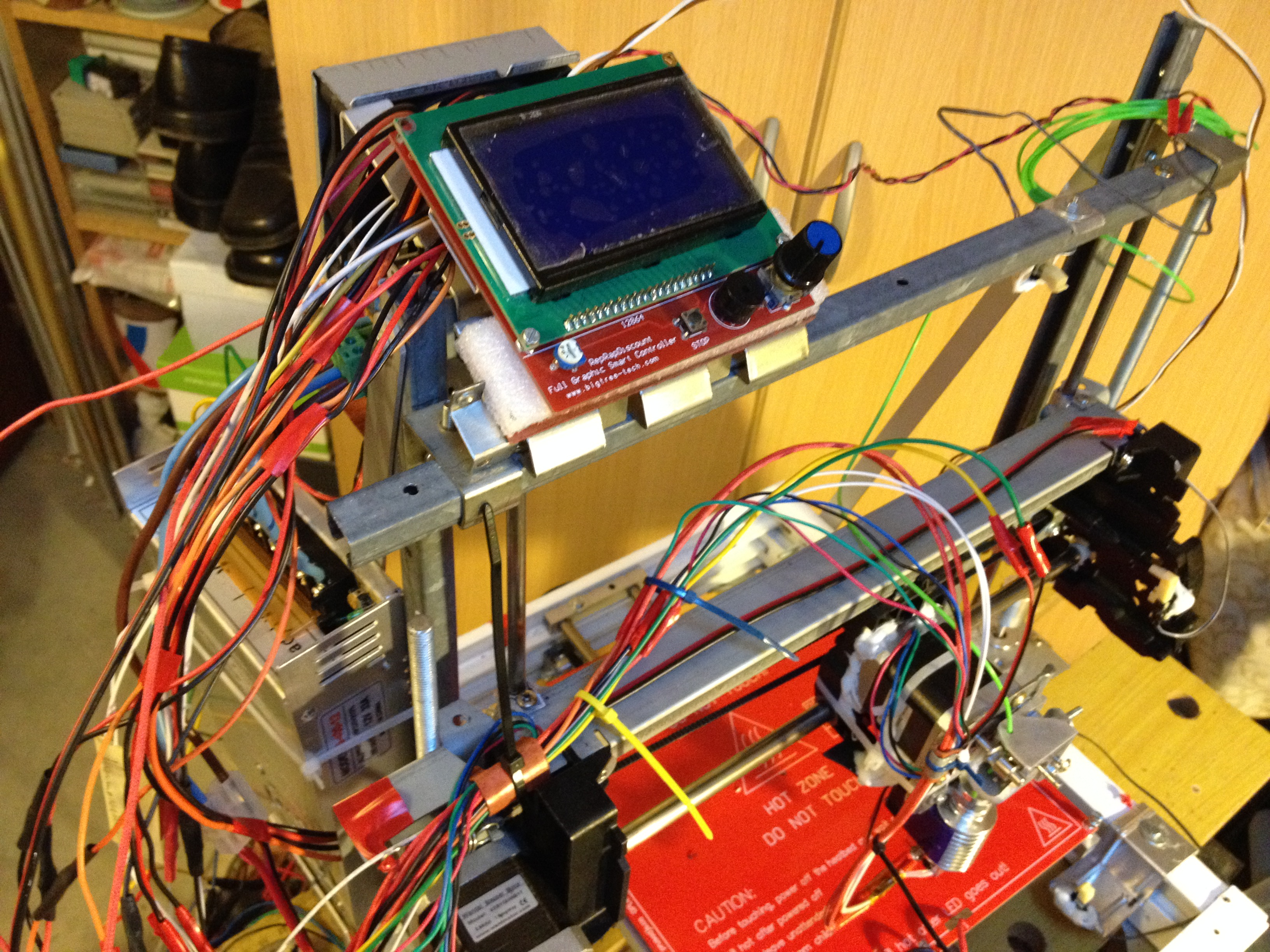
Fase montagem cabos eléctricos
Preparação e construção da estrutura, base da mesa aquecida, instalação motores, etc.
Montagem dos cabos eléctricos de todos os componentes
Componentes e diverso material

Fase de testes de funcionamento
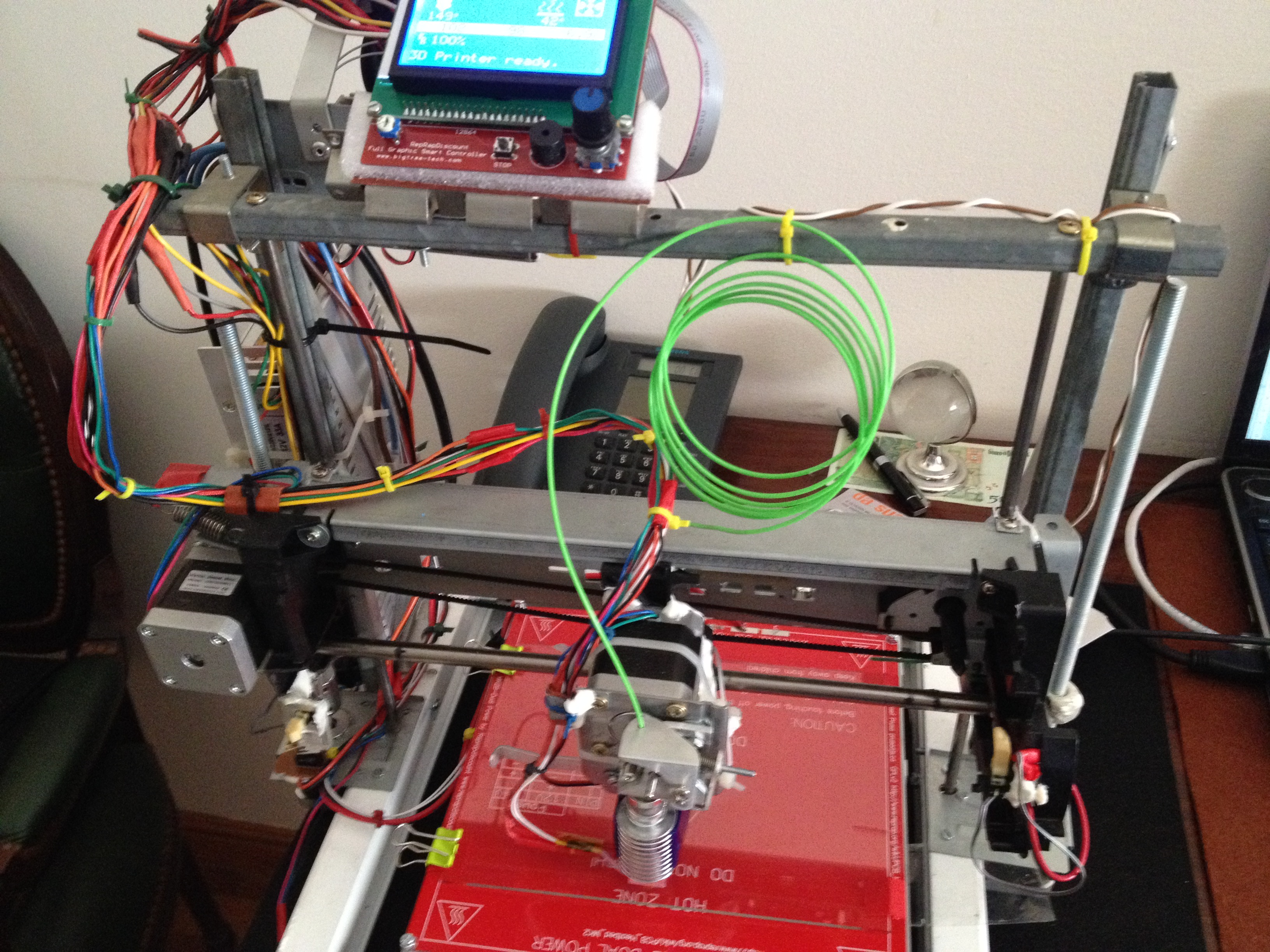
Controladora Arduino Mega, ramps 1.4, motores nema17, drivers, cooler, lcd, endstop, fonte alimentacão,
extruder, nozzles, mesa aquecida com termistor, correias, cabos, polias, rolamentos, eixos, uniões
acoplamento, ventoinhas dissipação, etc.
{kind=link}