.
.
.
.
.
.
.
.
.
.
.
webserver controlo electronico dispositivos
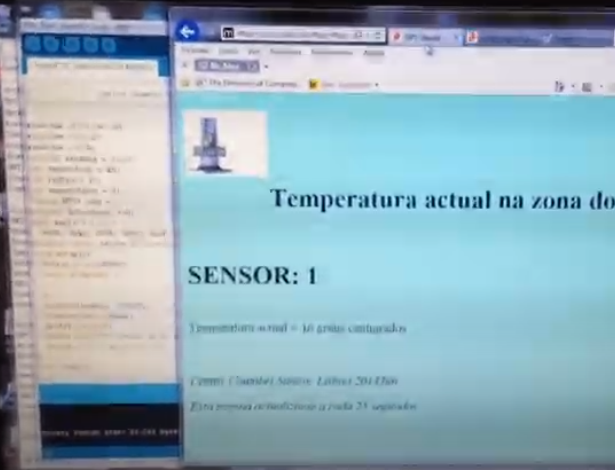
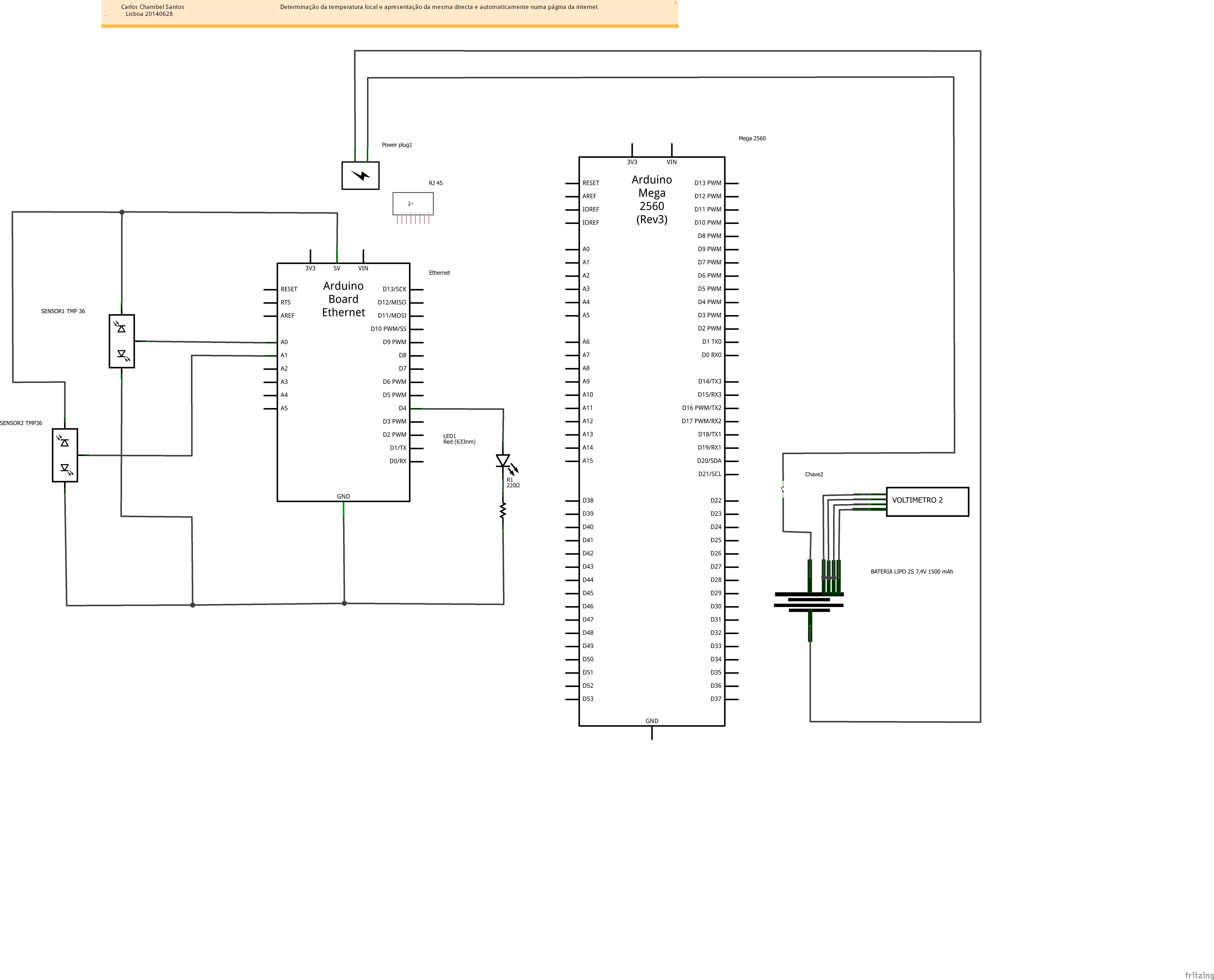
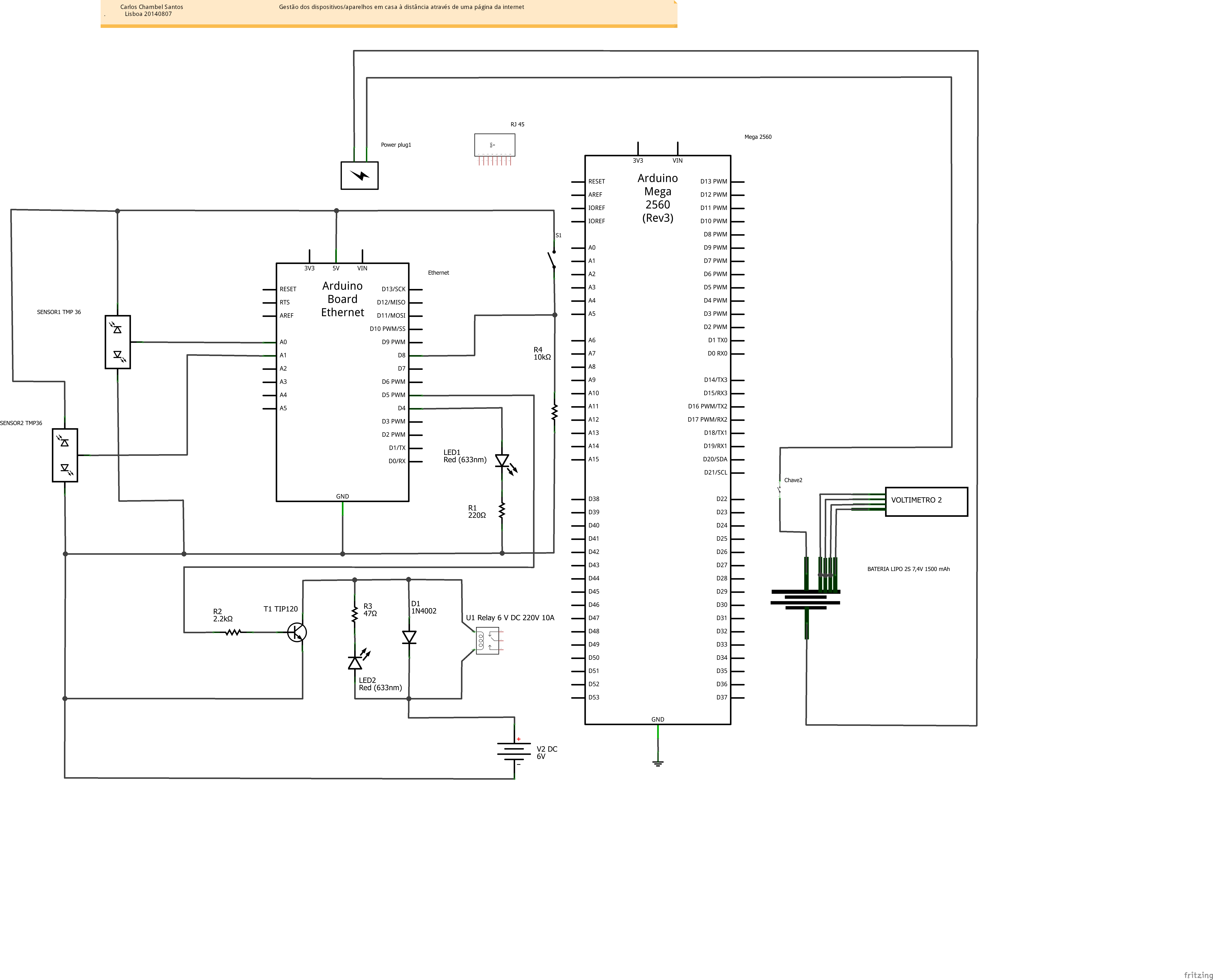
 Controlo de dispositivos elétricos através da internet (Web Server + Controlo com relé)
Disponibiliza numa página da internet um quadro com opções para
ligar ou desligar qualquer aparelho elétrico que se encontre
instalado na residência. Pode ser ligar/desligar luzes, alarmes,
câmara de filmar, rádios, máquinas, fechar/abrir persianas das
janelas, etc..
O sistema consiste num micro-processador, devidamente
programado para funcionar como Web Server, ligado directamente
à internet sem qualquer computador de suporte, interprete a opção
de menu seleccionada e envie ao circuito electrónico o respectivo
sinal digital e o converta em acção de ligar/desligar por relé ligado
ao cabo da corrente do dispositivo que se pretende controlar.
Deste modo, em qualquer parte do mundo, com um telemóvel,
tablet ou pc com acesso à internet, é possível efectuar em casa,
directa e imediatamente, qualquer dos procedimentos como os
acima enumerados.
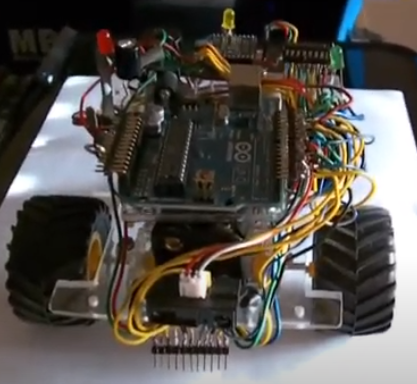
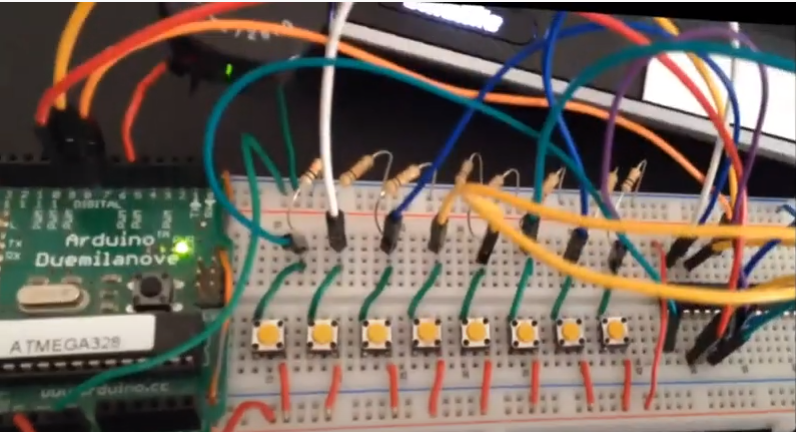
Equipamentos/componentes:
-Micro processor Arduino Mega 2560
-Arduino Ethernet Shield (W5100 TCP/IP Embedded Ethernet Controller)
-Sensor TMP36
-Cabo RJ45
-Relay 6V DC 220V AC 10A
-Transistor NPN TIP 120
-Diodo 1N4002
-Resistência 2,2 k
-Resistência 47R
-Resistência 220 R
-Interruptor linha
-Pilhas AA 1,5V
-Transformador com saída 9V DC, centro positivo
para ver mais clique aqui
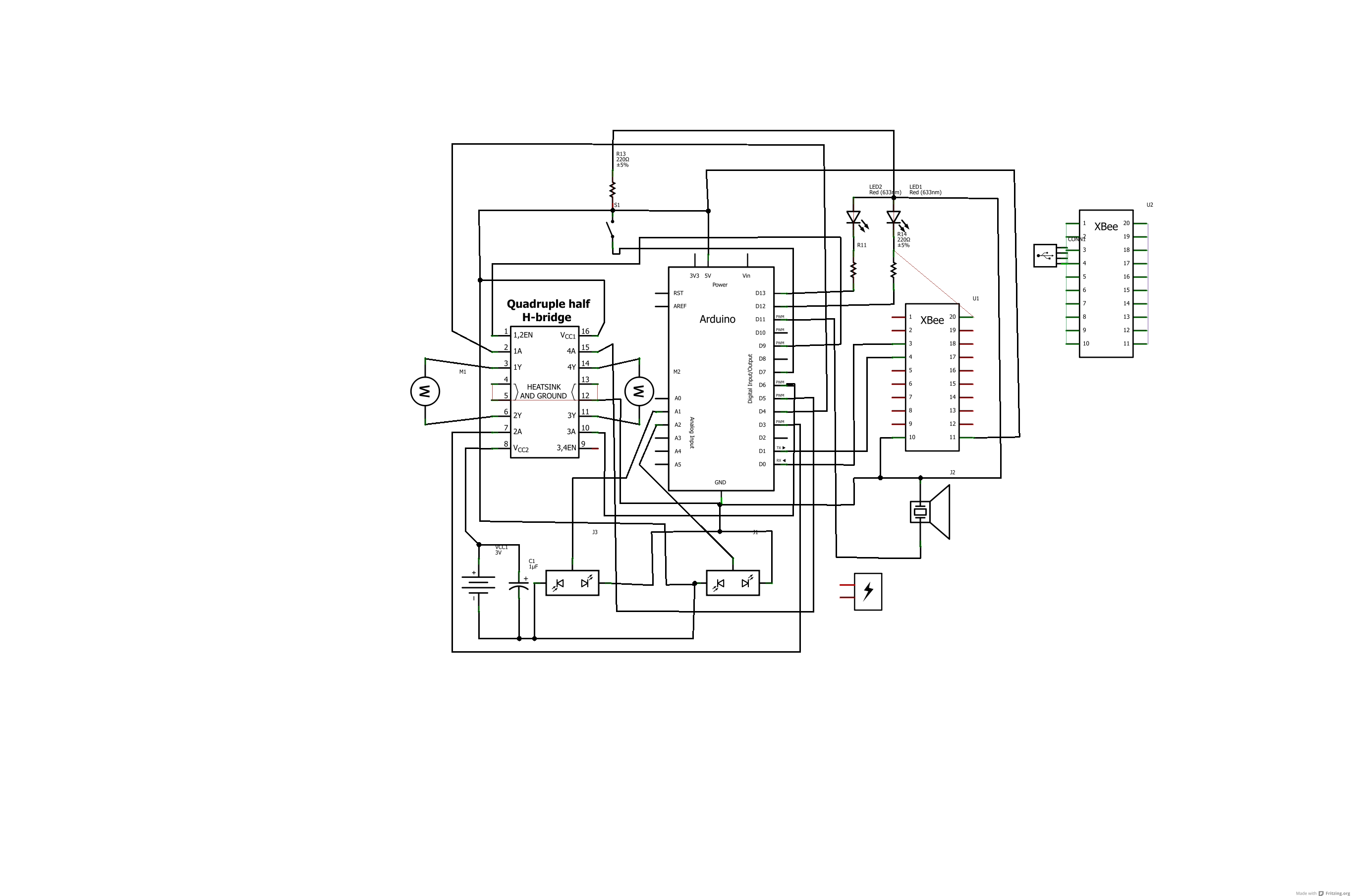
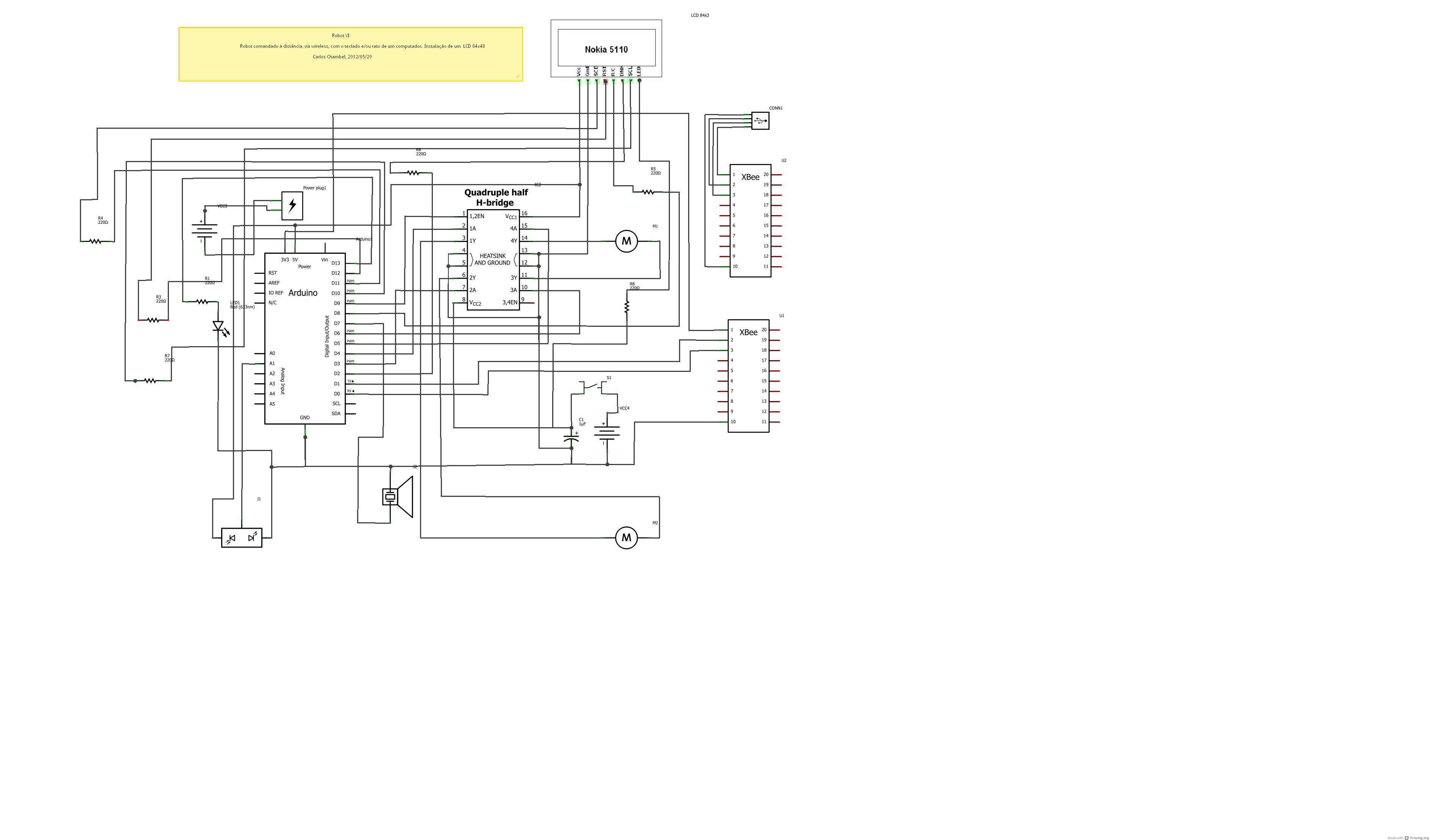
para ver o esquema electronico clique aqui
para ver o filme clique aqui
Controlo de dispositivos elétricos através da internet (Web Server + Controlo com relé)
Disponibiliza numa página da internet um quadro com opções para
ligar ou desligar qualquer aparelho elétrico que se encontre
instalado na residência. Pode ser ligar/desligar luzes, alarmes,
câmara de filmar, rádios, máquinas, fechar/abrir persianas das
janelas, etc..
O sistema consiste num micro-processador, devidamente
programado para funcionar como Web Server, ligado directamente
à internet sem qualquer computador de suporte, interprete a opção
de menu seleccionada e envie ao circuito electrónico o respectivo
sinal digital e o converta em acção de ligar/desligar por relé ligado
ao cabo da corrente do dispositivo que se pretende controlar.
Deste modo, em qualquer parte do mundo, com um telemóvel,
tablet ou pc com acesso à internet, é possível efectuar em casa,
directa e imediatamente, qualquer dos procedimentos como os
acima enumerados.
Equipamentos/componentes:
-Micro processor Arduino Mega 2560
-Arduino Ethernet Shield (W5100 TCP/IP Embedded Ethernet Controller)
-Sensor TMP36
-Cabo RJ45
-Relay 6V DC 220V AC 10A
-Transistor NPN TIP 120
-Diodo 1N4002
-Resistência 2,2 k
-Resistência 47R
-Resistência 220 R
-Interruptor linha
-Pilhas AA 1,5V
-Transformador com saída 9V DC, centro positivo
para ver mais clique aqui
para ver o esquema electronico clique aqui
para ver o filme clique aqui
.
.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}